测绘遥感能为智能驾驶做什么?
李德仁1,2

, 洪勇1

, 王密1,2, 唐炉亮1,陈亮1
1. 武汉大学测绘遥感信息工程国家重点实验室, 湖北 武汉 430079;
2. 地球空间信息技术协同创新中心, 湖北 武汉 430079
基金项目:中国工程科技发展战略湖北研究院咨询项目(HB2020B12);湖北省自然科学基金(2020CFA001);湖北省重点研发计划(2020BIB006)
摘要:从自动驾驶汽车到智能汽车,再到智能网联汽车,智能驾驶汽车技术及产业的快速发展,测绘与遥感技术起到了重要的支撑作用。本文首先介绍了国内外智能驾驶汽车的进展及其与常规汽车的区别,基于科学技术发展3次重要浪潮的视角,对比分析和归纳了自动驾驶与测绘遥感的发展历程及其核心技术驱动力。然后从顶层规划与政策环境、环境感知与计算决策车辆关键技术、高精地图与导航定位基础支撑关键技术、车路协同信息交互关键技术4个方面,对智能驾驶汽车的关键技术进行了介绍。以星基导航增强、高精度位置和姿态测量、多源融合感知等多项导航定位先进技术成果为实例,论证了测绘导航赋能单车智能驾驶;通过介绍移动测量与众包高精地图制作技术,阐述了测绘遥感对智能驾驶的关键支撑作用;以天基信息实时服务系统(PNTRC)建设为例,描述了测绘遥感未来将服务智能网联汽车“人-车-路-云”的发展趋势。最后总结分析了智能驾驶发展尚需解决的问题以及测绘遥感近期需要应对的挑战。
关键词:智能网联汽车测绘遥感高精地图导航定位


引文格式:李德仁, 洪勇, 王密, 等. 测绘遥感能为智能驾驶做什么?[J]. 测绘学报,2021,50(11):1421-1431. DOI: 10.11947/j.AGCS.2021.20210280
LI Deren, HONG Yong, WANG Mi, et al. What can surveying and remote sensing do for intelligent driving?[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50(11): 1421-1431. DOI: 10.11947/j.AGCS.2021.20210280
阅读全文:http://xb.sinomaps.com/article/2021/1001-1595/2021-11-1421.htm
引 言
智能汽车产业不仅包含传统汽车产业的智能化升级,还涉及通信系统、路侧设施等一系列关联产业,智能化与网联化是汽车产业大势所趋,单车智能+车路协同的网联协同发展路径逐渐成为行业共识,必将带来新的产品与生态模式,具备广阔的市场前景。
与常规汽车相比,智能(网联)汽车具备两大重要特征,一是多技术交叉、跨产业融合,智能(网联)汽车是机电与信息一体化产品,需要汽车、交通设施、信息通信基础设施与资源平台信息的融合感知,对地球空间信息技术提出了从空间二维到时空多维、从静态过去时向动态现在时、从抽象简略的符号化表达到精细丰富的实景三维重现等新需求,在智能网联汽车的云控平台上形成物理交通系统的实时数字映射,进而进行分层融合决策[1],实现车辆行驶与交通信号的实时调节,以优化车辆与交通运行的安全、效率等性能,地理信息平台技术要适应云控平台高并发、低延迟、全域交通、全要素高精实时数字映射的需求;二是智能(网联)汽车具有本地属性,汽车在行驶过程中需要通信、地图、数据平台等社会属性的支撑和安全管理[2],区域属性与社会属性增加,对测绘遥感技术及其数据服务提出了高精度(high accuracy)、高丰富度(high richness)、高动态性(high dynamic)、高可靠性(high reliability)、高安全性(high security)的挑战。
测绘遥感学科在中华人民共和国成立后经过70年的发展,已形成门类齐全、军民融合发展、经济社会影响较大的学科,近年来在数字化、网络化、智能化、实时化、社会化、大众化发展的大方向上均取得了飞速的发展[3]。面向智能网联汽车带来的深刻产业变革,测绘遥感人要抓住发展机遇,将其作为测绘地理信息科技的新战场,为我国智能汽车、智慧交通、安全出行及新型智慧城市的发展建设提供技术保障。
1 自动驾驶与测绘遥感发展历程回顾
1.1 自动驾驶汽车发展历程
汽车从遥控驾驶发展到电动化和自动化,进而朝向智能化和网联化的发展方向演进。1950—1990年是无人自动驾驶技术的第1个发展阶段,得益于无线电及通信技术的快速发展,美国无线电公司于1958年实现首个无人自动驾驶技术验证。
1990—2014年是无人驾驶技术的第2个发展阶段,GNSS及SLAM技术是关键驱动因素。2007年在美国国防部先进研究项目局(DARPA)Grand Challenge计划的牵引下,卡内基梅隆大学以22.53 km/h的平均时速完成了全长96 km复杂赛道的自动驾驶。国家自然科学基金委员会在2009年举办了首届“中国智能车未来挑战”。2011年,国防科技大学团队从长沙至武汉,完成了177 km高速公路场景下的无人驾驶,标志着国内无人驾驶技术逐渐成熟。然而惯性导航系统、激光雷达等导航与环境感知传感器价格较为昂贵,限制了无人驾驶技术在民用领域的大规模使用。
2014年至今,由于人工智能技术的快速发展,伴随着汽车电子电气架构的演变以及“软件定义汽车”理念的兴起,新型感知与控制传感器不断涌现,器件成本大幅快速降低,无人自动驾驶正历经第3次浪潮,L3、L4等级的自动驾驶已开展商业化应用。同时,随着5G等新一代宽带移动互联技术的发展,以及车端、路侧边缘端算力的提升,智能驾驶技术已从单车智能向车路协同方向发展。
1.2 测绘遥感技术发展回顾
与自动驾驶技术发展历程相似,测绘遥感技术也经历了数字化与网络化、智能化与自动化的发展阶段,目前正向实时化与大众化的方向发展。
数字化与网络化时代,大地测量、工程测量向全球导航定位技术和卫星重力测量发展,摄影测量向空天地海遥感发展,地图学与地理信息工程学融合,进而形成了3S(GNSS、RS、GIS)集成技术。同时,测绘遥感与电子信息、航空航天、资源环境、农林水利、城市科学、大气海洋、地球科学与信息技术等外部多种学科交叉组成了当今地球空间信息学[3-4]。
测绘遥感智能化与自动化时代,对地观测逐渐走向了天空地一体化的新时代,卫星星座、编队飞行、组合观测向智能化方向发展,高轨凝视监测成为技术焦点;高空间分辨率、高光谱分辨率、高辐射分辨率和高时间分辨率已经成为遥感系统发展的主要方向[5]。全球无地面控制高精度处理系统、空地遥感系统自主高精度定位定姿、天空地遥感信息实时智能服务等一大批遥感集成处理软件、核心装备与智能服务关键技术成果得到运用。
当前,人类已进入万物互联的时代,“空天地网”各类时空数据具有“5V”特点[6],即体量大、速度快、模态多样、真伪难辨,但是价值巨大,对测绘遥感提出了实时、众源、泛在的挑战[6-7]。因此,测绘遥感专业必须有更大的原始和集成创新,要把孤立的通导遥(通信、导航、遥感)做成系统联通的天空地互联网,满足天地网络的融合与一体化的协同传输,把位置、导航、遥感信息综合智能服务覆盖到互联网与物联网终端,做到“快、准、灵”[8],如图 1所示。
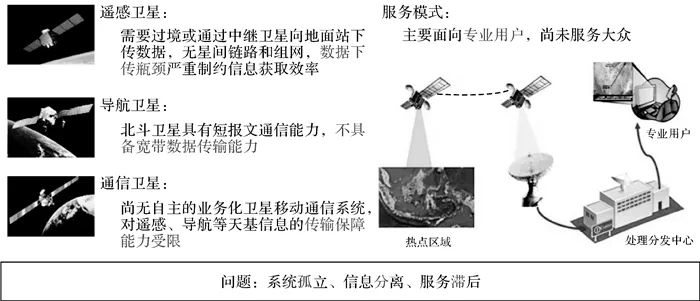
图 1 空天信息实时智能服务存在的问题[8]Fig. 1 Problems in real time intelligent service of aerospace information
图选项
2 智能网联汽车产业及技术进展
2.1 环境感知与计算决策车辆关键技术
智能汽车关键技术方面,环境感知传感器、车载计算平台作为智能网联汽车的“眼睛和大脑”,是目前国产核心关键器件技术攻关和产业化的热点。国产激光雷达性能指标与国际同类产品相当,国产毫米波雷达已有可支持多芯片级联的产品,并在集成度、雷达波束宽度、探测精度等方面具有一定优势。国产LTE-V2X通信芯片及模组已实现小规模量产,多种支持LTE-V2X的车载终端和路侧单元(RSU)产品已得到应用[9]。
作为高等级智能网联汽车核心,车载计算平台重要性愈发凸显,计算架构正在由分布式向集中式持续演进,国内多家企业纷纷布局并取得重要进展。2019年9月,基于征程2.0芯片的Matrix自动驾驶计算平台已经研制成功[10],该平台结合深度学习感知技术,具备强大的视觉感知计算能力。国产鲲鹏CPU芯片、异腾Al芯片、图像处理芯片等也分别亮相市场,搭载创新研发的操作系统,最高可提供352TOPS的算力,ROS内部节点通信时延小于1 ms,满足L4级及以上的自动驾驶需求[11]。
2.2 高精地图关键技术
高精地图是实现自动驾驶的必要条件。与传统二维导航电子地图相比,高精地图不但精度更高、图层数量更多,而且内容要求更加精细,还具有来自车端、路端、云端提供的实时、准实时动态丰富的道路信息。此外,这些信息还作为辅助驾驶和自动驾驶的输入源之一,与车辆CAN总线提供的多源传感器信息融合,共同服务自动驾驶车辆决策和控制。作为智能网联汽车产业链中的关键一环,高精地图在辅助环境感知、精准定位、决策规划等一系列过程中也具有不可替代的关键作用,生产、实时更新与存储发布是高精地图量产的3个关键问题。
国内外高精地图相关企业在高精地图采集、制作与应用过程中,逐步探索形成各自的模式。日本整车与地图开发商企业联合[12],制定了统一的基础静态高精地图数据规格,各企业再根据各自需求,进行交通、路侧等实时交通信息的动态叠加,进一步提升驾驶系统认知性能[13]。国内方面,《智能驾驶电子地图数据模型与交换格式》等相关国家标准已面向社会征求意见。
移动测量车获取高精度底图,并结合低成本众包采集进行增量更新与相对测量,已逐渐成为主流数据采集与更新方式[14]。
智能网联汽车对高精地图还有安全性的要求,为兼顾行业发展与地理信息安全保障需求,亟须标准化的公共服务平台进行支撑。具有本地属性的高精动态地图基础平台将构建动态数据汇聚、数据推送、服务监管支撑、数据合规处理4项核心能力,支撑政府监管,满足智能网联汽车对高精动态地图与定位的要求,并最终推进智能网联汽车的产品研发、检测认证、行业管理以及智慧出行等需求的生态建设[15]。
2.3 导航与位置服务关键技术
高精度导航定位方面,北斗卫星导航系统完成组网,高精度卫星定位技术逐步自主可控,全频一体化高精度芯片也已经进入投产阶段,产品性能与国际同类产品相当。导航位置增强服务已形成覆盖全国的亚米级实时定位服务,大部分省份可实现厘米级实时定位服务。
面向城市地上、地下复杂驾驶场景,采用卫星、惯性、UWB、里程计等多传感器融合,进行组合导航的方案已成为行业标配,环境感知与组合导航相融合的方式得到深入探索和应用,基于高精地图数据驱动的多源融合感知导航定位方法也已具备工程应用推广的条件,成本成为制约高精度导航定位大规模推广的制约因素,需要从国家战略的角度,推动构建智能网联汽车新型产业链。
2.4 车路协同信息交互关键技术
目前,我国智能网联汽车信息物理架构,正充分融合智能化与网联化发展特征,以车载计算基础平台、智能终端基础平台、云控基础平台、高精动态地图基础平台和信息安全基础平台等5大平台为载体[1, 15],实现“人-车-路-云”一体化协同的创新发展,自动驾驶技术从单车智能化逐步向智能化与网联化相融合的方向发展[16]。
自动驾驶通过采用智能化与网联化相融合的方式,可以有效弥补单车智能存在的能力盲区和感知不足,加速自动驾驶的商业应用,进而带动新的汽车交通系统形态。车联网中具有大量的车载终端、道路基础设施、支持V2X服务的行人等终端用户,车路/车人互动、路况感知与协同调度,视频或高精度地图分发等具有多种多样的应用需求,由此产生的海量终端接入及数据传输、处理、存储的需求,对网络带宽提出了更高的需求[17-18]。
5G-V2X车联网发展空间十分广阔[19],2020年7月,国际组织3GPP(the 3rd generation partner-ship project)宣布R16标准冻结[20-21],标志着5G第1个演进版本标准完成。R16支持V2V和V2I直连通信[22],可实现V2X车辆编队、半自动驾驶、外延传感器、远程驾驶等车联网应用场景。同时,5G网络切片架构从技术端解决了数据控制权和保密的问题[23-25],针对性地提出了MAO(mobile automotive operator)移动汽车运营商架构,平衡了V2X中各方的权益诉求,真正做到了端到端的按需定制并保证隔离性。
在车路协同信息交互关键技术方面,通过C-V2X“新四跨”互联互通应用示范活动,开展地理信息合规性运用、数据传输加密、位置信息偏转等先导示范,充分验证了C-V2X技术可行性[9]。随着江苏(无锡)、天津(西青)、湖南(长沙)等国家级车联网先导区的获批,我国车联网C-V2X也正逐步从示范验证走向规模化商用。
3 测绘遥感助力智能驾驶技术
人类正进入万物互联的时代,为适应新的时代特点,测绘遥感科学与信息科学不断与其他科学和技术交叉融合,提供各种方法进行时空数据采集、信息提取、网络管理、知识发现、空间感知认知和智能位置服务,具有以下7个方面的特点,即:无所不在、多维动态、互联网+智能物联、全自动与实时化、从感知到认知、众包与自发地理信息、面向服务[4];形成了高精度位置与姿态测量、全球空天地一体化的非线性地球参考框架构建技术、星基导航增强技术、天地一体化网络通信技术(6G)、多源成像数据在轨处理技术、信息智能终端服务技术、时空信息资源调度与网络安全、通信导航遥感一体多功能卫星平台设计与研制等一系列核心关键技术[5-6],这些关键技术正直接或间接地支撑着智能驾驶技术的发展(图 2)。
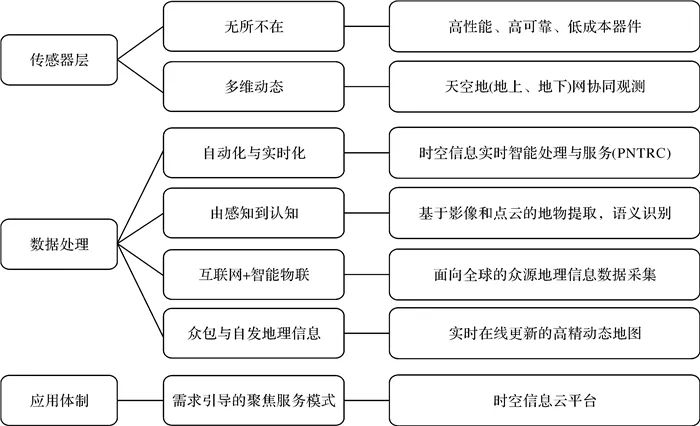
图 2 测绘遥感与智能网联汽车产业交融Fig. 2 Integration of mapping remote sensing and intelligent connected vehicle industry
图选项
导航定位技术与遥感技术是两种主要的获取空间信息的技术手段。导航定位主要解决目标点的连续定位问题,遥感主要解决面状目标几何和物理参数的反演,二者各有特色,优势互补,走向融合是这两项技术的发展趋势,二者的融合能够有效地提升空间数据获取效率,提升空间数据的可靠性[26]。
3.1 高精度导航定位是智能驾驶技术实现的关键
在城市复杂路况下提供室内外无缝、高精度、高可用的导航定位技术手段,是智能驾驶对测绘遥感提出的需求。我国学者近几年提出弹性PNT框架[27]和综合PNT体系[28],已经引起国际同行的关注。从多源融合的角度,未来PNT体系对雷达,光学影像等遥感技术也有极大需求。笔者从天基信息实时服务系统的角度提出了定位、导航、授时、遥感、通信(PNTRC)五位一体的融合构想,将在以下3个方面服务智能驾驶[8, 19]。
3.1.1 星基导航增强技术
GNSS增强技术划分为信息增强技术和信号增强技术两种。信息增强技术是指利用地面跟踪网数据解算GNSS信号的误差改正数和完好性信息,再通过地基互联网或者卫星通信信道播发给用户,用户利用接收到的GNSS的改正数修正本机接收的GNSS信号误差,从而提高定位精度和完好性。美国的WASS和中国的千寻网络都已能够为用户提供实时或准实时的分米、厘米级定位服务,但是对于GNSS信号不佳的应用场景,信息增强也无能为力[26]。
信号增强技术是指增强测距信号发射功率,GNSS信号增强的核心是提高GNSS信号的可用性。2018年,武汉大学发射的珞珈一号科学实验卫星是探索通信、导航、遥感一体化技术的一次成功的尝试。该卫星开展了首次低轨卫星导航增强试验,验证结果显示,采用低成本星载时钟生成的测距信号,在高仰角条件下,伪距和载波相位精度分别为1.5 m和1.7 mm,单星授时精度为10~30 ns,实时定位精度为30 cm[29],实现了导航信号的增强,通过实践验证了低轨卫星导航增强技术方案的可行性。
通过导航卫星和具有导航增强的低轨遥感和通信卫星进行组网,实现实时、全球覆盖的高精度位置增强服务,可望为智能网联汽车未来产业发展提供技术保障。
3.1.2 高精度位置姿态测量技术
智能网联汽车实现自动驾驶,需要实施环境感知、高精定位、决策规划、执行控制等一系列关键过程,车辆航向和姿态的精确测量与控制起着至关重要的作用,根据实际工程经验,在地下停车场、闸机口、实施转弯控制等过程中,车辆航姿的测量精度需要优于0.5°,保持精度要优于0.5°/h。
高精度POS(positioning and orientation system)是地理信息采集更新速度的核心技术装备。2009年,武汉大学在国家重大专项的牵引下,与国内惯性领域、卫星定位领域、遥感测绘领域内的多家科研院所密切合作,针对航空对地观测载荷-55℃~70℃极限温度下的惯性敏感器参数漂移难题,开展惯性敏感器误差形成机理研究,对温度梯度、温度变化率、高低频振动引起的动静态误差进行参数辨识建模与标定,提出动静态一体化的全温惯性测量单元标定方法,解决了精密速度、航向及姿态高精度测量难题。
之后,又建立了高精度位置姿态测量仪与光学载荷一体化、动基座标定与测试技术体系,提出了弱GNSS信号条件下基于可量测实景影像的POS数据纠偏方法,解决了光学载荷内外方位参数耦合相关性问题,极大地提高了航空遥感影像无控定位精度,在1000 m航高条件下,基于国产高精度位置和姿态测量技术的无控测图精度优于0.1 m。
3.1.3 多源融合感知导航定位技术
GNSS定位技术在“城市峡谷”复杂应用场景下,由于在卫星信号的遮挡、衰减和屏蔽,往往无法提供位置服务,多源融合的感知导航定位是智能网联汽车实现高精定位的工程首选。
针对车载移动感知在城市复杂环境下的高精度、高稳健导航定位需求,相关科研团队提出车载零延迟组合导航初始化方法,解决地下车库、隧道等高频次复杂场景下(弱无GNSS信号)的应用问题[30-33],实现了无须惯性初始化的零延迟航姿输出[34],实现开机即用;提出了基于GNSS/INS/SLAM/GIS融合导航和多目标协同定位方法[35],实现了车载移动感知的高稳健性和车车协同感知[36],为智能网联单车、车车以及车路协同等场景应用实现高可靠、低成本的定位提供了技术支持。
自动驾驶可靠性要求高,GNSS提供绝对定位信息,而影像匹配导航(SMN)适合于局部精确导航,GNSS/SMN(影像匹配导航)相结合,利用视觉信息匹配和高精地图辅助来提升GNSS定位的可靠性[37-39]。通过识别影像中的交通标志、人工编码标志等特征,并且利用这些标志的几何信息辅助GNSS技术和INS技术定位[39-40],以弥补GNSS导航性能的不足,进而实现自动驾驶防撞、避障、变道导航等应用。
3.2 移动测量与高精地图制作
GNSS道路信息采集与更新实时智能驾驶技术的重要支撑技术,与传统人工测量和调绘相比,移动测量具备高效率、低成本、劳动强度低、成果全面、可靠性高等特点,广泛应用于基础测绘、电子地图测绘和修测、公路GIS与路产管理、道路裂缝检测、电力及铁路资产管理等领域[41-42]。
3.2.1 移动测量技术
经过20多年的发展,移动测量系统(mobile mapping system)内涵不断扩充,《实景地图数据产品》《可量测实景影像》《车载移动测量技术规程》已作为国家和行业标准服务于测绘遥感、智慧城市等各行业,多种型号装备服务国防建设,切实提高了我国的对地观测技术、装备水平,极大增强了国防实力,成为3S集成的经典案例[5]。
伴随智能网联汽车的发展,移动测量技术在高精地图采集上得到了进一步应用,从专业的高精度地图采集车,到面向众包数据生产的微小型采集设备,再到各种无人自主巡检巡测平台,移动测量技术的采集精度不断提高、数据处理自动化程度大幅提升、设备成本大幅降低,移动测量与5G及边缘计算结合,已经发展为实时智能处理、社会化、大众化的时空信息获取方式。
3.2.2 高精地图生产关键技术
现阶段高精地图主要采用“移动测量+众包”数据采集方式,以及“集中生产”和“众包分布”两种地图生产模式,两者各有优劣,以“移动测量”模式生产高精度地图基础数据,以众包模式对高精度地图实现数据补充及更新,如图 3和图 4所示。
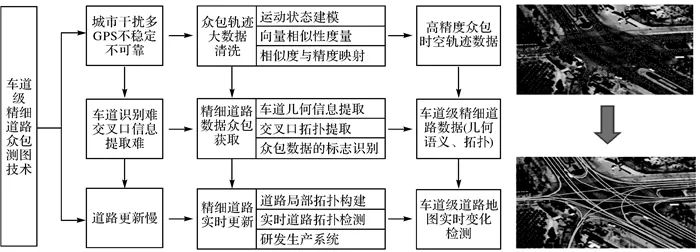
图 3 车道级精细道路众包测图技术Fig. 3 Crowdsourcing mapping technology of lane level fine road
图选项
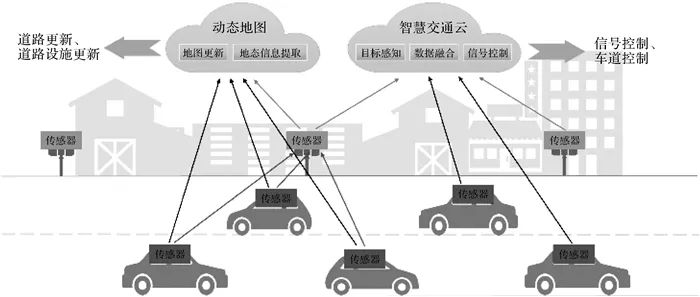
图 4 “众包+车路协同”的采集模式与边云协同的计算处理模式Fig. 4 "Crowdsourcing+vehicle road collaboration" collection mode and side cloud collaboration computing processing mode
图选项
众包轨迹数据精度低、处理难;车辆驾驶行为多变,轨迹中车道识别难;交叉口信息复杂提取难;导航数据多源异构、变化检测识别困难、更新难,于是有学者提出了基于约束混合高斯的众包轨迹车道聚类融合方法,精度达到0.3~0.5 m,解决了车道识别、拓扑提取与融合难题,形成了一种采集成本低、更新快的高精度道路众包测图(lane-level road crowd-mapping)理论与方法。
未来,“众包+车路协同”的采集模式,与边云协同的计算处理模式将成为高精地图运营的主要模式[10, 43-44],通过路侧设备接入地图采集网关,内置道路变化更新识别程序,通过对新旧路测数据的比对,完成设备采集范围内道路环境变化的识别,通过5G网络设置的分流策略,车端地图数据可直接与路侧边缘计算节点地图服务模块互联,降低端到端网络时延,帮助实现快速计算任务处理和低时延结果反馈[13, 45-46]。
3.2.3 高精动态地图与智慧交通数据交互
传统电子地图服务于人,而高精地图的主要服务对象是车[7],智能动态的高精地图作为未来出行的关键一环,是交通资源全时空实时感知的载体和交通工具全过程运行管控的依据[43]。从单车智能到智能网联、再到车路协同发展,智能网联汽车与车路协同驾驶对高精地图提出了高精度(high accuracy)、高丰富度(high richness)、高动态性(high dynamic)、高可靠性(high reliability)、高安全性(high security)不同阶段层次的需求。
高精度:较普通导航电子地图而言,高精地图需要达到厘米级的绝对和相对坐标精度。
高丰富度:高精度地图所含有的道路交通信息元素更丰富和细致。
高动态性:从高精地图到高精动态地图,通过与路侧传感器融合感知,实现高可靠、高覆盖的交通全要素实时数据在高精度基础地图上的动态映射。
高可靠性:智能网联汽车动态随机分布、路侧传感器异构多源等特性,以及网联自动驾驶对信息精度、实时性与可靠性的高要求[47],带来车路感知系统配置、路侧感知部署、多源数据时间同步、多源异构数据关联等难题,对高精动态地图基础平台的感知与融合可靠性能力提出了挑战[15]。
高安全性:高精度测绘数据关乎国家安全,目前地图审核仅限于静态基础信息,对于未来动态数据的加载,现有审图模式难以满足需求,需要进一步优化[11]。
同时,还要考虑到智能网联汽车快速发展带来的网络信息安全问题,需要在感知层、传输层、数据层、应用层等多个维度,解决数据采集、传输、使用、更新过程中的安全保密及可控安全利用问题,做到防伪造、防篡改、防抵赖和抗干扰[48-51]。
3.3 PNTRC与智能驾驶相互赋能
构建定位、导航、授时、遥感、通信五位一体的PNTRC(positioning, navigation, timing, remote sensing, communication)天基信息实时服务系统,已成为当代空天信息技术发展的重要方向[8, 19]。一星多用、多星组网、天地互联、多网融合的地球空间信息智能服务,能够实现新媒体(全息远程呈现),新空口(多种异构无线传输接入),新架构(地面和卫星融合的移动网络)和新融合(通信、计算、导航、感知),实时导航定位精度有望提高到分米级甚至厘米级。
自动驾驶地图与智慧交通的融合将为各自领域带来新的发展机遇,更高的接入速率(10 GB~1 Tbps),更低的接入时延(ms级以下),将会为“人-车-路-网-云”的服务能力和效率带来极大提升,智能驾驶的云控平台实时分析决策后,将信息下发给行人、车辆以及交管部门,服务道路精准监控、智能交通流量分析、基础设施故障监控、智慧执法等,满足智能驾驶各种应用场景需要。
在新的智能网联环境下,地球空间信息技术的发展也将催生新的发展趋势, 智能网联汽车和车联网,作为智慧城市的神经,将提供智能互联的实时感知与管控传感器网络(high perception and control),构建新一代信息感知环境,实现智慧交通系统的全面感知、高效传输与智能控制,建立满足未来城市和交通系统的大数据全息感知体系。
未来,遍布城市各个角落,无所不在的智能网联汽车传感器网实时获取时空数据,将以前所未有的速度获得多维动态监测,基于智能网联汽车的智能互联的实时感知与管控传感器网络,能够满足智慧城市室外到室内,从地上到地下的真三维高精度建模,时空动态数据的感知、分析、认知和变化检测在人类社会可持续发展中将发挥越来越大的作用。
4 发展和展望
测绘遥感需要在以下4个方面服务和应对智能驾驶技术提出的挑战。
(1) 汽车正加速由出行工具向智能终端和网络载体转变,智能驾驶对测绘遥感提出了高精度、高可靠性、高集成度和低成本的要求,测绘遥感需要与人工智能、大数据、云计算及5G/6G通信等技术集成融合,共同服务智能驾驶与车联网。
(2) 高精地图将向高精动态地图基础平台发展,智能驾驶高精地图的标准、制作、实时更新与保密方法需要创新[47, 52]。
(3) 车路协同的智能化是智能网联汽车的发展趋势,离不开云、管、端的协同配合,V2X与感知技术、移动边缘计算(MEC)和室内外无缝导航定位相融合,能够为实现智能网联汽车发展提供强大助力。目前,集5G-V2X通信、传感器(视觉、激光、毫米波雷达)边缘实时感知、室内外无缝高精度导航定位,以及高精地图服务相融合的移动边缘感知定位模块,尚属空白。
(4) 智能网联汽车的发展离不开新一代通信、地球空间信息、汽车系统、集成技术等多学科支持,发展智能汽车需要充分挖掘测绘、导航、通信、大数据、云计算等学科交叉融合潜能。
王之卓先生在庆祝《测绘学报》创刊30周年的文章中曾指出[53]:“整个世界正在经历着新的技术革命,许多学科从它的中心走向边缘,形成不同学科间相交界的边缘学科,这些边缘学科有时却有强大的生命力量,迫使人们不断努力去开拓占领和扩大自己知识结构的边缘。”
如今,又一个30年已经过去,但王之卓先生的话依然在鼓励和鞭策着我们,测绘遥感界的全体同仁,要抓住新基建时代地理信息产业的机遇与挑战[6],顺应智能驾驶技术的发展趋势,开辟测绘遥感领域新战场!
作者简介
第一作者简介:李德仁(1939—), 男, 博士, 教授, 博士生导师, 中国工程院院士, 中国科学院院士, 研究方向为地球空间信息学理论与方法。E-mail: drli@whu.edu.com
通信作者:洪勇, E-mail:2019106190017@whu.edu.cn
初审:张艳玲
复审:宋启凡
终审:金 君
往期推荐
资讯
○ 地理信息工程国家重点实验室2021年度开放基金课题申请说明
○ 招聘 | 中国地图出版集团多岗位招聘
○ 招聘启事 | 实景地理环境安徽省重点实验室2021年工作人员招聘公告
○ 纳贤 | 北京大学彭宇新教授团队招聘博士后
○ 2021年国际影响力TOP期刊榜单发布!
○ 重磅!数字孪生技术应用白皮书(2021)
○ 包干制做法明确 科研人员激励力度加大——自然科学基金委有关负责人解读《国家自然科学基金资助项目资金管理办法》
会议
○ 第一届中国生态系统遥感学术研讨会(三号通知)
○ 《测绘学报》2021年编委会会议在青岛召开
○ 会议通知 | 2021中国地理信息科学理论与方法学术年会通知(第二号)
○ 关于第八届“测绘科学前沿技术论坛”再次延期召开的通知
《测绘学报》
○《测绘学报》2021年第11期“智能驾驶环境感知专刊”目录
○ 测绘学报 | 朱杰:基于主题模型的地理环境时空数据隐含语义理解
○ 测绘学报 | 左溪冰 : 高光谱影像小样本分类的图卷积网络方法
○ 测绘学报 | 成飞飞 : 结合自适应PCNN的非下采样剪切波遥感影像融合
《测绘通报》
○ 室内高精度三维测图新技术
○ 面向上海城市数字化转型的新型测绘
○ 图像全站仪及图像测量发展与展望
○《测绘通报》2021年第10期目录
《北京测绘》
○《北京测绘》2021年第9期摘要推荐
○《北京测绘》2021年第8期摘要推荐(下)
○《北京测绘》2021年第8期摘要推荐(上)
○《北京测绘》2021年第7期摘要推荐(下)
《测绘科学技术学报》
○ 《测绘科学技术学报》2021年第1期重点论文推荐
○ 摘要 |《测绘科学技术学报》2021年第3期摘要推荐
○ 摘要 |《测绘科学技术学报》2021年第2期摘要推荐
○ 摘要 |《测绘科学技术学报》2021年第4期摘要推荐
○ 摘要 |《测绘科学技术学报》2021年第5期摘要推荐
《地球信息科学学报》
○ 《地球信息科学学报》2021年第10期佳文推介
○ 《地球信息科学学报》2021年第9期佳文推介
○ 《地球信息科学学报》2021年第8期佳文推介
○ 专刊征稿:社会感知与地理大数据挖掘(征稿中)
《测绘工程》
○ 摘要 |《测绘工程》2021年第5期摘要推荐
○ 摘要 |《测绘工程》2021年第4期摘要推荐
○ 摘要 |《测绘工程》2021年第3期摘要推荐
○ 测绘教学 | 后疫情时代“线上+线下”混合教学模式创新——以测绘类课程视角
《中国空间科学技术》
○《中国空间科学技术》2021年第5期摘要推荐
○ 摘要 |《中国空间科学技术》2021年第4期摘要推荐
○ 摘要 |《中国空间科学技术》2021年第3期摘要推荐
○ 火卫二地形地貌探测综述
《卫星应用》
○ 摘要 |《卫星应用》2021年第9期摘要推荐
○ 摘要 |《卫星应用》2021年第8期摘要推荐
○ 摘要 |《卫星应用》2021年第7期摘要推荐
○ 综述 | 北斗系统应用趋势分析
《Journal of Geodesy and Geoinformation Science》
○《测绘学报(英文版)》(JGGS)LiDAR专刊发布
○《测绘学报(英文版)》(JGGS)第一次编委会会议顺利召开
○论文推荐(六)| Speical Issue on New LiDAR Technologies and Techniques
○论文推荐(五)| Speical Issue on New LiDAR Technologies and Techniques
《Satellite Navigation》
○ [综述]| 高扬教授:GNSS智能手机定位:进展、挑战、机遇和未来展望| SANA佳文速递
○ 熊超教授:地磁暴期间夜间低纬电离层和赤道等离子体不规则体| SANA佳文速递
○ 徐元博士:面向有色测量噪声下UWB/INS组合行人导航的分布式卡尔曼滤波| SANA佳文速递
○ 杨飞博士:GNSS天顶对流层精化模型的构建与分析| SANA佳文速递
○ 牛小骥教授:用半解析法分析GNSS/INS在铁路轨道测量中的相对精度| SANA佳文速递
《自然资源遥感》
○ 《自然资源遥感》入驻“智绘科服”融媒体平台!
○ 《自然资源遥感》征稿:“海岸带空间资源及生态健康遥感监测”专栏
版权声明:CosMeDna所有作品(图文、音视频)均由用户自行上传分享,仅供网友学习交流。若您的权利被侵害,请联系删除!
本文链接://www.cosmedna.com/article/533674511.html